|
|
| Line 10: |
Line 10: |
| | === Introduction === | | === Introduction === |
| | | | |
| − | The project was divided into N modules: | + | The project was divided into 5 modules: |
| | | | |
| − | * Sensor ... | + | * Sensor/Bridge Controller |
| − | * Motor.. | + | * Motor Controller |
| − | * ... | + | * Geo Controller |
| − | * Android | + | * Driver/LCD Controller |
| | + | * Web Application |
| | | | |
| | === Team Members & Responsibilities === | | === Team Members & Responsibilities === |
Revision as of 20:16, 11 May 2023
CAN CLAN
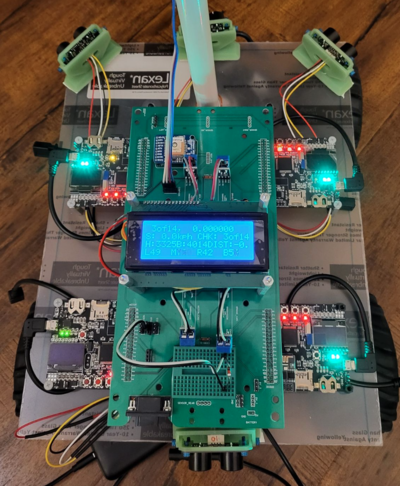
Picture of the RC Car
Abstract
<2-3 sentence abstract>
Introduction
The project was divided into 5 modules:
- Sensor/Bridge Controller
- Motor Controller
- Geo Controller
- Driver/LCD Controller
- Web Application
Team Members & Responsibilities
<Team Picture>
Gitlab Project Link - https://gitlab.com/rashmi_sv/the_CAN_clan.git
Rashmi Suhas Vaidya
- Geo Controller
- GPS and Compass Interfacing
- Integration Testing
- Wiki Page Update
Zeel Jatinkumar Lia
- Motor Controller
- RPM Sensor
- Integration Testing
- Wiki Page Update
Priyam Hajisheth
- Driver Node
- LCD interfacing
- Integration Testing
- Wiki Page Update
Xinyu He
- Sensor Controller
- Integration Testing
- Wiki Page Update
- Bluetooth integration with Sensor
Hongjin Cheng
- Bluetooth module interfacing
- Motor Controller
- Android App
- Integration Testing
Schedule
| Week#
|
Start Date
|
End Date
|
Task
|
Status
|
| 1
|
03/01/2023
|
03/07/2023
|
- Read previous projects, gather information and discuss among the group members.
- Discuss each team-member's preference and assign controller roles
- Create parts list for the RC car, discuss, and decide on each item
|
|
| 2
|
03/08/2023
|
03/14/2023
|
- Order all parts from list and save tracking/price info
|
|
| 3
|
03/15/2023
|
03/21/2023
|
- Design interface for Bridge and Sensor Controller, with unit tests
- Design interface for Motor Controller, with unit tests
- Design interface for Driver and LCD Controller, with unit tests
- Integrate Bridge/Sensor Controller to CAN bus with DBC, handling messages
- Integrate Motor Controller to CAN bus with DBC, handling messages
- Integrate Driver Controller to CAN bus with DBC, handling messages
- All parts received
|
|
| 4
|
03/22/2023
|
03/28/2023
|
- Design interface for GEO Controller, with unit tests
- Integrate Geological Controller to CAN bus with DBC, handling messages
- Integrate Ultrasonic sensor with SJ2 to verify distance from obstacle is sensed
- Integrate Motor and Steering with PWM control, figure out the working ranges
- Integrate GPS sensor with SJ2, get GPGGA strings over UART, parse current coordinates
|
|
| 5
|
03/29/2023
|
04/04/2023
|
- Integrate Compass sensor with SJ2 board over I2C and get bearing values
- Connect all nodes together on the CAN bus, verify messages across all nodes
- Code the Haversine formula into GEO controller to get distance and heading based on current and destination coordinates
- Write driver logic based on distance and heading from GEO and obstacle details from sensor nodes
- Integrate GPS and Compass peripherals, writing the driver and unit tests
- MILESTONE - All individual modules considered "Roughly Working" with hardware interfaced
|
|
| 6
|
04/05/2023
|
04/11/2023
|
- Finalize the DBC file for project
- Create a detailed schedule for remaining tasks, dividing work into four milestones
- Start RPM sensor logic implementation and add it to Motor controller
- Integrate Bluetooth module to Bridge/Sensor controller, with UART logic
- Work on integrating the MaxBotix ultrasonic sensor with the sensor module
- Work on Stage-1 mounting of all components on the RC car with temporary fixing
- Fix problem with BDC-DBF conversion on BusMaster and show graphs on it
- MILESTONE - Basic car driving ability with basic obstacle avoidance
|
|
| 7
|
04/12/2022
|
04/18/2022
|
- Complete basic working Mobile App which connects to the bridge controller, sends a test message and receives sensor values
- Work on calibrating compass sensor to get accurate bearing readings
- Create a on-board battery power supply for all components
- Work on Stage-2 mounting of all components on the RC car with soldering of parts and wires
- Complete the Compass calibration and read accurate readings from it
- Have PWM signals reliably controlling the motor speed
- Start working on reliable navigation with obstacle avoidance
- MILESTONE - Integrated, reliably "heading" towards provided destination bearing, basic obstacle avoidance
|
|
| 8
|
04/19/2023
|
04/25/2023
|
- Send fake destination coordinates from Mobile app and start and stop commands
- Integrate LED display to the driver controller and show current heading, speed on it
- Add a GPS Lock LED on the Geo controller
- Add more LEDs on various SJ2 boards for more debug information for MIA, obstacle detection, etc
- Work on getting the car pass the Ramp test
- Work on Stage-3 permanent fixing of all components on the RC car
- Outdoor testing for longer range trips, and complete necessary enhancements
- MILESTONE - Integration part 2, perform obstacle avoidance and destination bearing
|
|
| 9
|
04/26/2023
|
05/02/2023
|
- Integrate Google Maps on Mobile App for destination coordinates
- Show debug information (GPS Coordinates, Sensor Values, Values from Compass, Calculated Distance, Motor Speed) on App and LED screen
- Work on getting the car to pass the U-turn test
- Verify that the electrical and mechanical work is complete
- MILESTONE - Integration and outdoor testing, adding necessary software changes
|
|
| 10
|
05/03/2023
|
05/09/2023
|
- Work on On/Off Button - power button to start the car
- Enable the Headlights to the car
- Work on robustness of the car, perform corner test cases in actual runs of the car
- Start working on report writing of the project
- MILESTONE - Integration testing, deal with uneven terrain, reliable waypoints navigation and obstacle avoidance
|
|
| 11
|
05/10/2023
|
05/16/2023
|
- Finish project report writing
- Full System Testing, any needed Hardware and software fixes and optimizing
|
|
| 11
|
05/24/2023
|
05/24/2023
|
|
|
Parts List & Cost
| Item#
|
Part Description
|
Vendor
|
Qty
|
Cost
|
| 1
|
|
Redcat []
|
1
|
$
|
| 2
|
SN65HVD23 CAN Transceivers
|
Waveshare[1]
|
5
|
$
|
| 3
|
HRLV-EZ0 Ultrasonic Sensors
|
[]
|
3
|
$
|
| 4
|
|
[]
|
1
|
$17.50
|
| 5
|
|
[]
|
1
|
$59.50
|
| 6
|
|
[]
|
1
|
$33.18
|
| 7
|
|
[]
|
1
|
$5.99
|
| 9
|
|
[]
|
1
|
$7.00
|
Printed Circuit Board
<Picture and information, including links to your PCB>
CAN Communication
<Talk about your message IDs or communication strategy, such as periodic transmission, MIA management etc.>
Hardware Design
<Show your CAN bus hardware design>
DBC File
Gitlab link to our DBC file :
https://gitlab.com/rashmi_sv/the_CAN_clan/-/blob/dev/dbc_file/dbc/project.dbc
<You can optionally use an inline image>
Sensor ECU
<Picture and link to Gitlab>
Hardware Design
Software Design
<List the code modules that are being called periodically.>
Technical Challenges
< List of problems and their detailed resolutions>
Motor ECU
<Picture and link to Gitlab>
Hardware Design
Software Design
<List the code modules that are being called periodically.>
Technical Challenges
< List of problems and their detailed resolutions>
Geographical Controller
<Picture and link to Gitlab>
Hardware Design
Software Design
<List the code modules that are being called periodically.>
Technical Challenges
< List of problems and their detailed resolutions>
Communication Bridge Controller & LCD
<Picture and link to Gitlab>
Hardware Design
Software Design
<List the code modules that are being called periodically.>
Technical Challenges
< List of problems and their detailed resolutions>
Master Module
<Picture and link to Gitlab>
Hardware Design
Software Design
<List the code modules that are being called periodically.>
Technical Challenges
< List of problems and their detailed resolutions>
Mobile Application
<Picture and link to Gitlab>
Hardware Design
Software Design
<List the code modules that are being called periodically.>
Technical Challenges
< List of problems and their detailed resolutions>
Conclusion
<Organized summary of the project>
<What did you learn?>
Project Video
Project Source Code
Advise for Future Students
<Bullet points and discussion>
Acknowledgement
=== References ===
